!python detect.py --weights runs/train/tutorial/weights/best.pt --img 416 --conf 0.4 --source ../coco128/images/train2017/*370.jpg
と検出を実行します。ここでは、画像番号 *370.jpg を使用しました。
実行するたびに、runs/train/exp2, runs/train/exp3 で表現される通り、結果は exp3,4,5,...とフォルダーが作成され、保存されます。結果は以下のコードを実行すると表示できます。
Image(filename='runs/detect/exp7/000000000370.jpg', width=600)
370.jpg
ここでの学習では、websiteに用意されているデータ、coco128 datasets、 を利用しました。web上で公開されているdatasetsの代表例として、Roboflowがあります。
実際には、個人が自らのdatasets を作成して、学習をする必要に迫られます。yolov5におけるdatasetsは、画像用のxyz.jpg とそれに対応するラベリング(アノテーション)の xyz.txt からなるペアの集合です。そして、モデル作成のためのデータ(教師データ、検証データ)格納場所、クラス分類数やクラス名についての設定ファイル data.yaml を作成する必要があります。
画像のラベリング(アノテーション)を作成するためには、的確なソフトを利用する必要があるでしょう。yoloの仕様に合わせたアノテーションを作成できるソフトとして、labelImgがあります。
YOLOv5モデルの学習:Roboflowのデータを用いた例 |
次に、Roboflowにあるデータセットをダウンロードして、それを用いたモデルの学習を取り上げます。その1例が、「Training a Custom Object Detection Model With Yolo-V5」に紹介されています。この解説に沿って、実行してみましょう。
以下の順序で進めます。Google Colab上のノートブックで行います。GPUが利用可能なPC実機で行うときも、Google Driveへのmountの部分を若干修正すれば実行できます。
- Preparing the dataset
- Environment Setup: Install YOLOv5 dependencies
- Setup the data and the directories
- Setup the YAML files for training
- Training the model
- Evaluate the model
- Visualize the training data
- Running inference on test images
- Export the weight files for later use
「Preparing the dataset」の部分は、スクラッチから自身で作成することはせず、Roboflowからのデータセットを借りることにします。画像のアノテーションもデータセットに含まれています。 Aquarium Datasetをダウンロードします。Githubのアカウント持っていれば、容易にダウンロードできます。ダウンロードしたzipファイルをroboflow.zipという名前で保存します。Google Colabを使用するので、My\ Drive にフォルダーYoloV5を作成して、そのなかに、roboflow.zipをアップロードします。
Environment Setup: Install YOLOv5 dependenciesをGoogle Colabで行います。このColab を開いてください。
!git clone https://github.com/ultralytics/yolov5 # clone repo
%cd yolov5
%pip install -qr requirements.txt # install dependencies
import torch
from IPython.display import Image, clear_output # to display images
clear_output()
print('Setup complete. Using torch %s %s' % (torch.__version__, torch.cuda.get_device_properties(0) if torch.cuda.is_available() else 'CPU'))
と入力します。
Setup complete. Using torch 1.8.0+cu101 _CudaDeviceProperties(name='Tesla T4', major=7, minor=5, total_memory=15109MB, multi_processor_count=40)
と表示されます。
!python detect.py --weights yolov5s.pt --img 640 --conf 0.25 --source data/images/ Image(filename='runs/detect/exp/zidane.jpg', width=600)
として、作動状況をチェックします。正常ならOK。
「Setup the data and the directories」を行います。My\ Driveにmountを実行して、roboflow.zipファイルを読み込み、展開します。
from google.colab import drive
drive.mount('/content/drive')
!cp /content/drive/My\ Drive/YoloV5/roboflow.zip /content/ !unzip /content/roboflow.zip !rm /content/roboflow.zip
!ls /content/yolov5 ************ result*********** data LICENSE requirements.txt train.py yolov5s.pt data.yaml models runs tutorial.ipynb detect.py README.dataset.txt test utils Dockerfile README.md test.py valid hubconf.py README.roboflow.txt train weights
データセットがyolov5のなかに、test、train 、valid、data.yamlとして保存されました。
次に、「Setup the YAML files for training」を行います。
%cat data.yaml ************ result***** train: ../train/images val: ../valid/images nc: 7 names: ['fish', 'jellyfish', 'penguin', 'puffin', 'shark', 'starfish', 'stingray']
data.yamlはこのような中身になっています。train及びvalのパスが異なっているので、
train: ./train/images
val: ./valid/images
と修正します。Google Colab上での修正は若干複雑なコードが必要です。モデルの設定ファイル yalov5s.yamlを修正します。なぜなら、yolov5s.yamlでは numbe of classes が80 となっているので、ネットワークの構造を同じとしても、roboflowのデータはnumber of classes が7なので、nc:7 とする必要があります。この修正したyamlファイルをcustom_yolov5s.yamlとします。この修正も若干複雑です。
# Below we are changing the configuration so that it becomes compatible to number of classes required in this project
%%writetemplate /content/yolov5/models/custom_yolov5s.yaml
# parameters
nc: {num_classes} # number of classes # CHANGED HERE
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# anchors
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, BottleneckCSP, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 9, BottleneckCSP, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, BottleneckCSP, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
[-1, 3, BottleneckCSP, [1024, False]], # 9
]
# YOLOv5 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, BottleneckCSP, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, BottleneckCSP, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, BottleneckCSP, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, BottleneckCSP, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
この部分のコードの説明は省略します。自身のPCで実行するときは、このような修正はエディターを使えばすごく単純です。
「Training the model」に着手します。
%%time %cd /content/yolov5/ !python train.py --img 416 --batch 80 --epochs 100 --data './data.yaml' --cfg ./models/custom_yolov5s.yaml --weights ''
---
---
Epoch gpu_mem box obj cls total labels img_size
95/99 6.14G 0.08579 0.06447 0.03307 0.1833 589 416: 100% 6/6 [00:17<00:00, 2.85s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100% 1/1 [00:02<00:00, 2.67s/it]
all 127 909 0.366 0.215 0.0866 0.0207
Epoch gpu_mem box obj cls total labels img_size
96/99 6.14G 0.08445 0.06218 0.03317 0.1798 540 416: 100% 6/6 [00:16<00:00, 2.79s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100% 1/1 [00:02<00:00, 2.18s/it]
all 127 909 0.679 0.0885 0.0678 0.0156
Epoch gpu_mem box obj cls total labels img_size
97/99 6.14G 0.0846 0.06318 0.03267 0.1805 692 416: 100% 6/6 [00:17<00:00, 2.91s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100% 1/1 [00:02<00:00, 2.03s/it]
all 127 909 0.668 0.0975 0.0669 0.0145
Epoch gpu_mem box obj cls total labels img_size
98/99 6.14G 0.08446 0.06337 0.03221 0.18 741 416: 100% 6/6 [00:17<00:00, 2.90s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100% 1/1 [00:02<00:00, 2.26s/it]
all 127 909 0.657 0.112 0.0693 0.0148
Epoch gpu_mem box obj cls total labels img_size
99/99 6.14G 0.08437 0.06652 0.03114 0.182 652 416: 100% 6/6 [00:17<00:00, 2.88s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100% 1/1 [00:06<00:00, 6.02s/it]
all 127 909 0.0607 0.291 0.067 0.0145
fish 127 459 0.071 0.558 0.176 0.039
jellyfish 127 155 0.0648 0.6 0.137 0.0286
penguin 127 104 0.0387 0.394 0.0467 0.0113
puffin 127 74 0.00646 0.027 0.00689 0.00128
shark 127 57 0.0812 0.386 0.073 0.0162
starfish 127 27 0.163 0.0741 0.0249 0.00483
stingray 127 33 0 0 0.00458 0.000619
Optimizer stripped from runs/train/exp/weights/last.pt, 14.8MB
Optimizer stripped from runs/train/exp/weights/best.pt, 14.8MB
100 epochs completed in 0.585 hours.
CPU times: user 4.61 s, sys: 597 ms, total: 5.21 s
Wall time: 35min 27s
学習が終了するまで約35分かかります。学習の結果、モデルの重みが runs/train/exp/weights/best.pt に保存されます。
「Running inference on test images」を行います。学習されたモデルの重みを用いて実行します。
# use the best weights! # Final weights will be by-default stored at /content/yolov5/runs/train/exp/weights/best.pt %cd /content/yolov5/ !python detect.py --weights /content/yolov5/runs/train/exp2/weights/best.pt --img 416 --conf 0.4 --source ./test/images
結果を表示します。
#display inference on ALL test images
#this looks much better with longer training above
import glob
from IPython.display import Image, display
for imageName in glob.glob('/content/yolov5/runs/detect/exp2/*.jpg'): #assuming JPG
display(Image(filename=imageName))
print("\n")
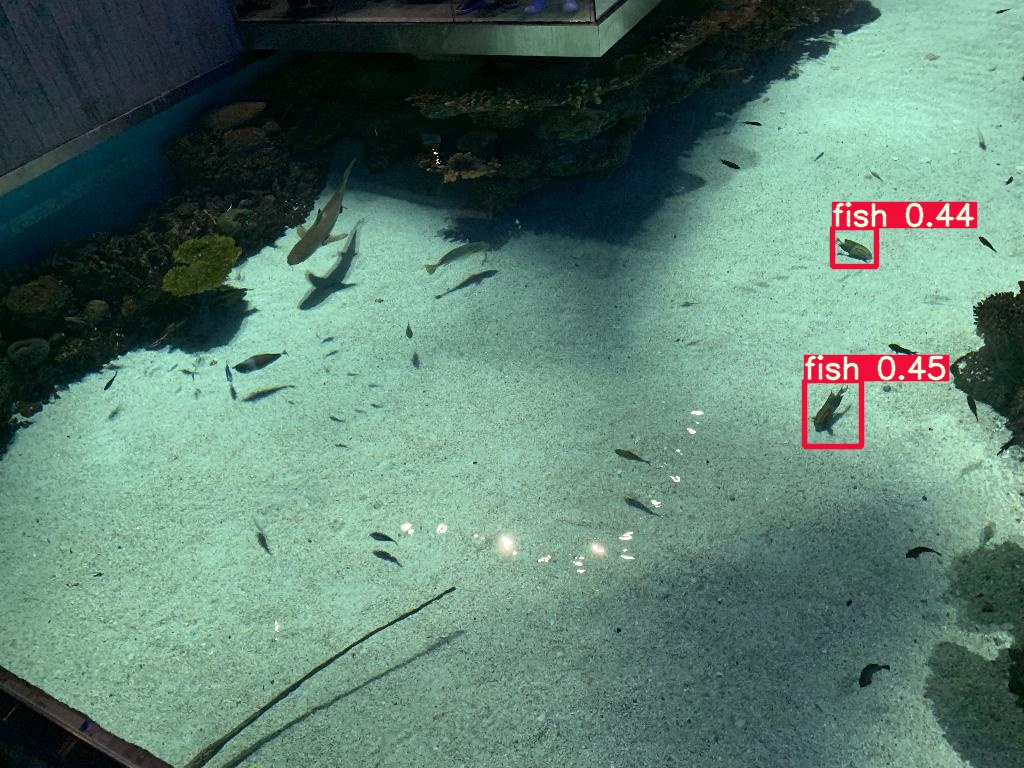
roboflow.jpg
検出精度はかなり低いですね。データの個数が少ないのと、エポック数が少ないからだと思われます。
学習したモデルの重みを保存します。
%cp /content/yolov5/runs/train/exp/weights/best.pt /content/gdrive/My\ Drive/YoloV5
「Export the weight files for later use」が完了しました。この後の利用の仕方は省略します。
YOLOv4-Darknetモデルの学習 |
YOLOv4-Darknet モデルは実行ファイルのdarknetを使用することもあり、学習により多くの時間が必要です。AlexeyABさんのGithub repoにある「 how to train (to detect your custom objects)」に従って準備します。
自身で用意するデータセットには、obj.names, obj.data, train.txt, test.txt という設定ファイルが必要です。objという名称は任意です。obj.names は物体検出の対象となる物体の名称を設定します。obj.data はデータのクラス数および画像データへのパスを記述します。train.txt は学習用の画像データのリスト、test.txt はテスト用の画像データのリストを記述します。 自身の dataset はディレクトリ/data/ の下に以下のように配置します。ディレクトリdata/obj/の下に画像データとそのラベルデータを配置します。
data/obj.names
data/obj.data
data/train.txt
data/test.txt
data/obj/ images & labels are placed in this directory
以下で用いる画像データセット(血液画像のBCCD dataset)のラベル化された物体の種類(クラス数)は3 なので、obj.data は
classes = 3 train = data/train.txt valid = data/test.txt names = data/obj.names backup = backup/
となります。obj.namesは
Platelets RBC WBC
です。plateletsは血小板、RBC(Red Blood Cell)は赤血球、WBC(White Blood Cell)は白血球です。/p>
この「how to train」に従えば、用いるデータに対応して、yolov4-custom.cfg を書き換える必要があります。修正の具体的な内容は以下のように記述されています。
- batch を batch=64 に変更
- subdivisions を subdivisions=16 に変更
- max_batches を classes*2000 、ただし、画像数より多く、 6000 以下に: f.e. max_batches=6000 if you train for 3 classes
- steps を max_batches の 80% と 90% に: f.e. steps=4800,5400
- network size の設定で、width=416 height=416 に、または、 any value multiple of 32
- 3つの各[yolo]-layers で classes=80 を 使用するデータの物体のクラス数に変更: line no. 970, 1058, 1146
- 各[YOLO]層の前にある[convolutional]層にある[filters=255]をfilters=(classes + 5)x3に変更: この[convolutional]層は [YOLO]層の直前に位置するものだけ、合計3つ. line no. 963,1051,1139
yolov4-custom.cfg は非常に長いので、Colabで行うのが複雑なので、Githubのrepoにあるファイルで書き直します。変更したcfg ファイルをcustom_yolov4_detector.cfg と名前をつけて、ディレクトリcfg のなかに保存します。このように修正を加えたYOLOv4のパッケージを私のGithub repoにアップしました。これを gi clone して利用します。
# clone darknet repo !git clone https://github.com/mashyko/darknet
OpenCVとGPUを使用できるように Makefile を書き換えて、コンパイルして、darkent 実行ファイルを作成します。
# change makefile to have GPU and OPENCV enabled %cd darknet !sed -i 's/OPENCV=0/OPENCV=1/' Makefile !sed -i 's/GPU=0/GPU=1/' Makefile !sed -i 's/CUDNN=0/CUDNN=1/' Makefile !sed -i 's/CUDNN_HALF=0/CUDNN_HALF=1/' Makefile
# make darknet (builds darknet so that you can then use the darknet executable file to run or train object detectors) !make
以上で、darknet の実行ファイルがビルドされました。次に、pre-trained weights-file (162 MB): yolov4.conv.137 をダウンロードします。これを学習の時の初期重みとして利用します。
#download the newly released yolov4 ConvNet weights %cd /content/darknet !wget https://github.com/AlexeyAB/darknet/releases/download/darknet_yolo_v3_optimal/yolov4.conv.137
custom dataset を用意します。RoboflowにあるBCCD Datasetをダウンロードします。ダウンロードする前に、このサイトに行って、keyを取得しておく必要があります。
#if you already have YOLO darknet format, you can skip this step %cd /content/darknet !curl -L "https://app.roboflow.com/ds/[your key here]" > roboflow.zip; unzip roboflow.zip; rm roboflow.zip
BCCD Dataset を取得したら、obj.data 、obj.names 、および、train.txt、 test.txt ファイルを作成します。
#Set up training file directories for custom dataset
%cd /content/darknet/
%cp train/_darknet.labels data/obj.names
%mkdir data/obj
#copy image and labels
%cp train/*.jpg data/obj/
%cp valid/*.jpg data/obj/
%cp train/*.txt data/obj/
%cp valid/*.txt data/obj/
with open('data/obj.data', 'w') as out:
out.write('classes = 3\n')
out.write('train = data/train.txt\n')
out.write('valid = data/valid.txt\n')
out.write('names = data/obj.names\n')
out.write('backup = backup/')
#write train file (just the image list)
import os
with open('data/train.txt', 'w') as out:
for img in [f for f in os.listdir('train') if f.endswith('jpg')]:
out.write('data/obj/' + img + '\n')
#write the valid file (just the image list)
import os
with open('data/valid.txt', 'w') as out:
for img in [f for f in os.listdir('valid') if f.endswith('jpg')]:
out.write('data/obj/' + img + '\n')
学習を開始します。
!./darknet detector train data/obj.data cfg/custom-yolov4-detector.cfg yolov4.conv.137 -dont_show -map #If you get CUDA out of memory adjust subdivisions above! #adjust max batches down for shorter training above
1時間以上学習を続けましたが、学習は終了しませんでした。おそらく、数時間かかるでしょう。しかし、1時間程度の学習結果を用いても、検出精度はそれなりにでます。バウンディング・ボックスの精度が低いです。この結果は、このColabで確認できます。
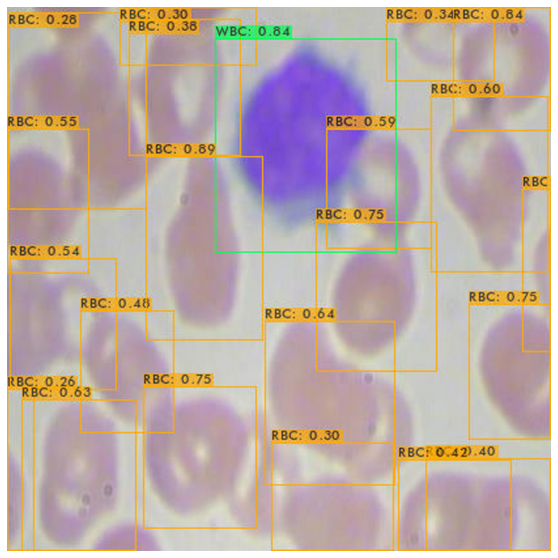
BCCD.png
YOLOv4-darknetモデルよりも非常に短い時間で学習ができるPytorch版のScaled-YOLOv4の学習を取り上げます。上記のYOLOv5モデルの学習と類似の手順を用いた Scaled-YOLOv4のカスタムデータによる学習の事例を見てみましょう。
この事例はこのColabにあります。
***********To be continued
***********
ご質問、コメントなどは こちらからメール送信して下さい。